Équipes de robots terrain en déploiement autonome
En cours
Cobots mobiles sécuritaires pour l'assemblage manufacturier
En cours
DESSAIM - chorégraphie d'essaims
En cours
IPE par le mouvement explicable
En cours
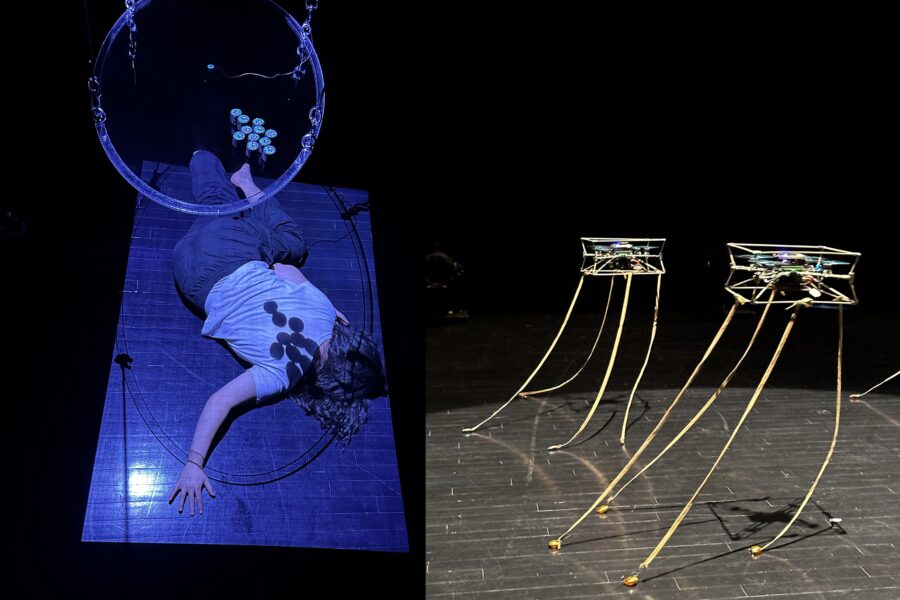
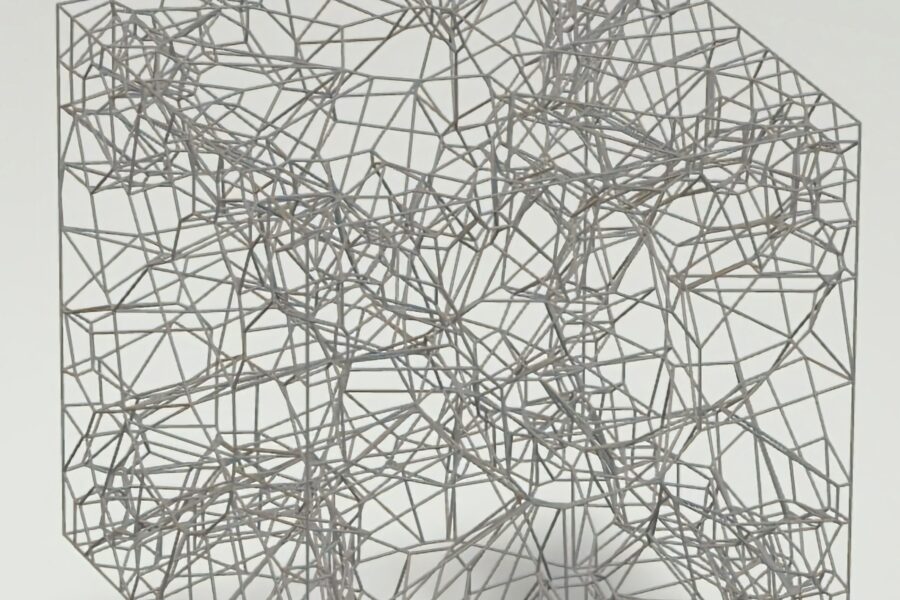
Aérostabiles : microtreillis volants
En cours
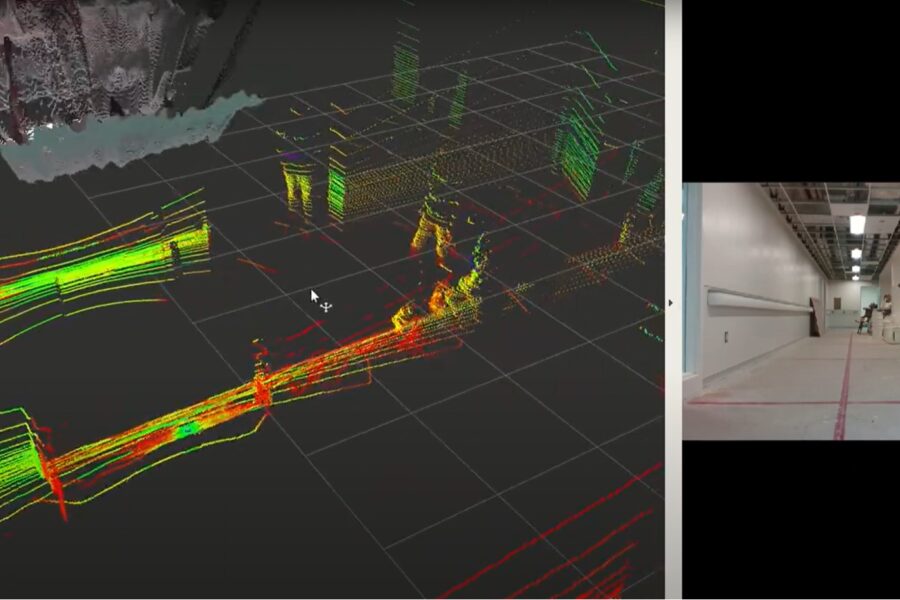
Bâti immobilier modélisé aidé par des robots mobiles
En cours
Voir comme une abeille
En cours
Exploration planétaire ergonomique avec groupes de robots
En cours
ARIES: Autonomous Robotic Intelligent Explorer Sphere
En cours
A moment of being : une utopie non cousue
En cours
Écosystème opérateur-essaim pour une intervention en cas d'urgence
2016 → 2019
Mécanisme déployable de capture de débris orbitaux
2014 → 2018
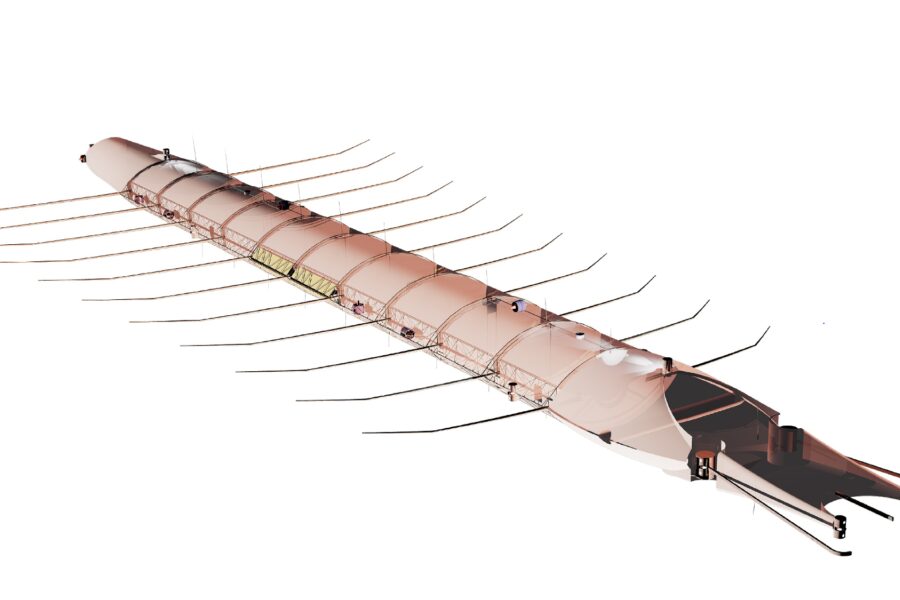
Aérostabiles : études des Tryphons
2009 → 2015