Recherches
Équipes de robots terrain en déploiement autonome
Année
En cours
Axe de recherche
Interaction personne-machine
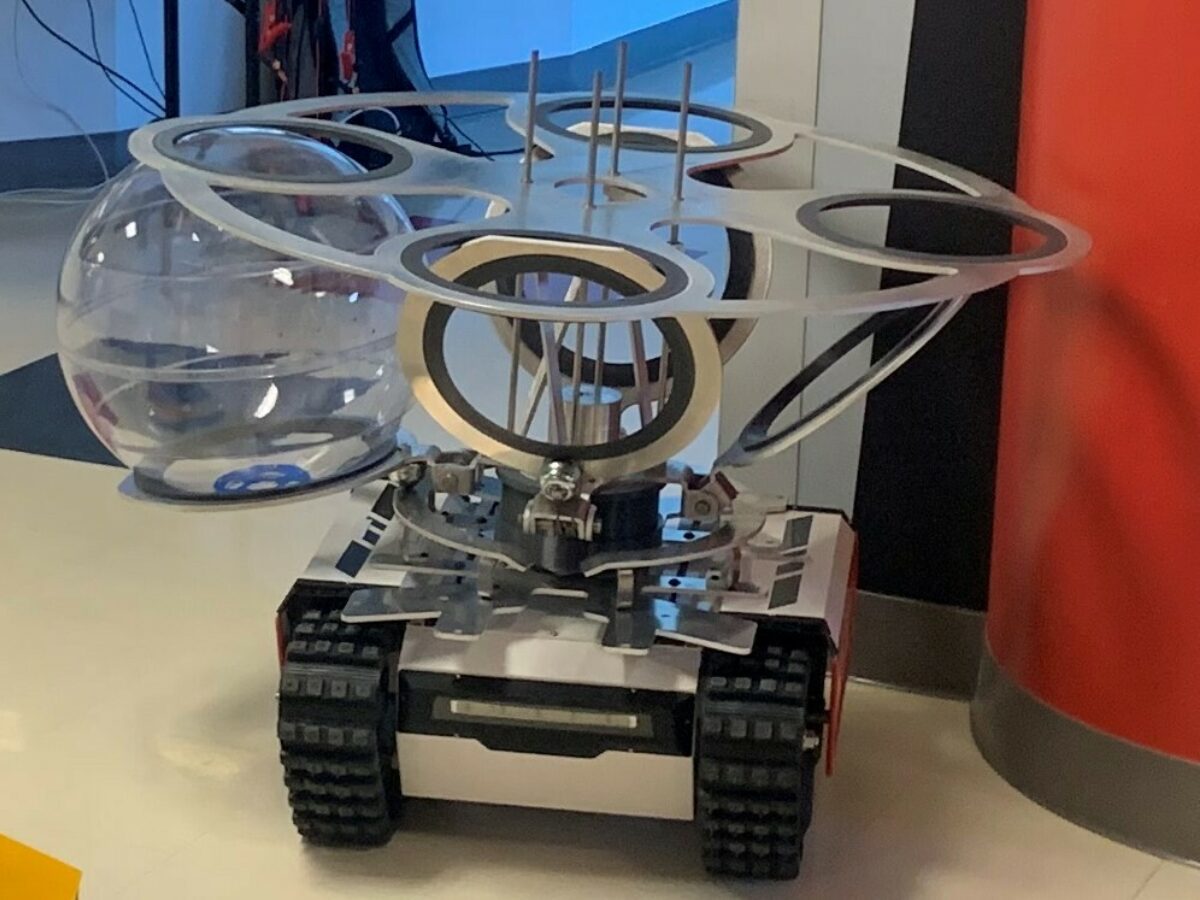
Afin de libérer l’essaim d’aéronefs des contraintes du laboratoire et de travailler sur des niveaux technologiques (TRL) plus élevés, nous allons déployer une flotte hétérogène comprenant de petits aéronefs d’extérieurs et une base mobile de changement de batterie conçue pour cette flotte. Les aéronefs doivent intégrer des ordinateurs de bord avec suffisamment de puissance de calcul embarquée et un bas coût énergétique (faible consommation et faible poids). Les Spiri Mû de l’entreprise canadienne Spiri Robotics conviennent parfaitement. La base de changement de batteries sera conçue à partir d’une plateforme mobile tout terrain BunkerMini de l’entreprise AgileX. L’adaptation des aéronefs et la conception de la base robotisée sont en cours. En plus de leur capteurs inertiels, récepteur GPS et module de communication (Wifi et Xbee), tous les robots (air et terre) seront équipés d’un système de positionnement relatif à large bande (UWB), similaire à celui des drones intérieurs du laboratoire.