Researches
Self-deployable outdoors robot teams
Year
In progress
Research axis
Human-machine interaction
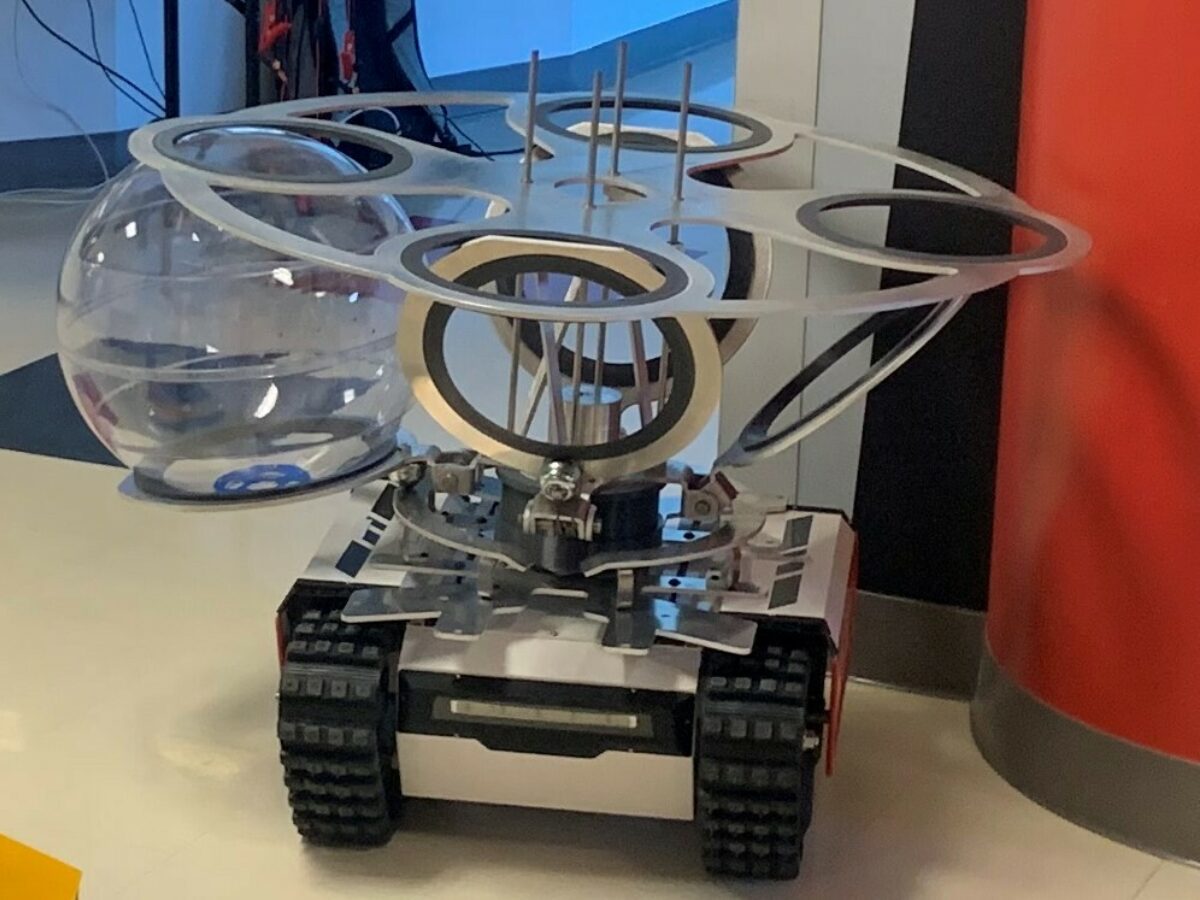
In order to free our UAV swarm from the constraints of the laboratory and to work on higher technological levels, we will deploy a heterogeneous fleet comprising small outdoor aircraft and a mobile battery swapping base designed for this fleet. Aircraft must incorporate on-board computers with sufficient on-board computing power and low energy cost (low consumption and low weight). The Spiri Mû from the Canadian company Spiri Robotics are ideal. The battery change base will be designed using an all-terrain mobile platform BunkerMini from AgileX. The adaptation of the aircraft and the design of the robotic base are in progress. In addition to their inertial sensors, GPS receiver and communication module (Wifi and Xbee), all robots (air and ground) will be equipped with a wideband relative positioning system (UWB), similar to that of the interior drones of the laboratory.