Recherches
Aérostabiles : études des Tryphons
Année
2009 → 2015
Axe de recherche
Aérospatiale
Interaction personne-machine
En raison des progrès technologiques récents, l’interaction personne-robot (human-robot interaction — HRI) est devenue un important domaine de recherche pour l’ingénierie et les arts, en particulier au cours de la dernière décennie. Les intérêts dominants de ces domaines sont cependant extrêmement diversifiés : les défis changent constamment et l’évolution des compétences des robots tout comme l’évolution des méthodes pour comprendre leur environnement influenceront radicalement la conception et l’implantation de prototypes de recherche. Lorsque des robots sont utilisés dans une installation publique ou une performance artistique, ils aident à mieux comprendre l’interaction personne-robot. À cet effet, les Aérostabiles, un projet interdisciplinaire art-science-technologie couronné de succès, a conduit à une nouvelle façon de mener des recherches sur l’interaction personne-robot.
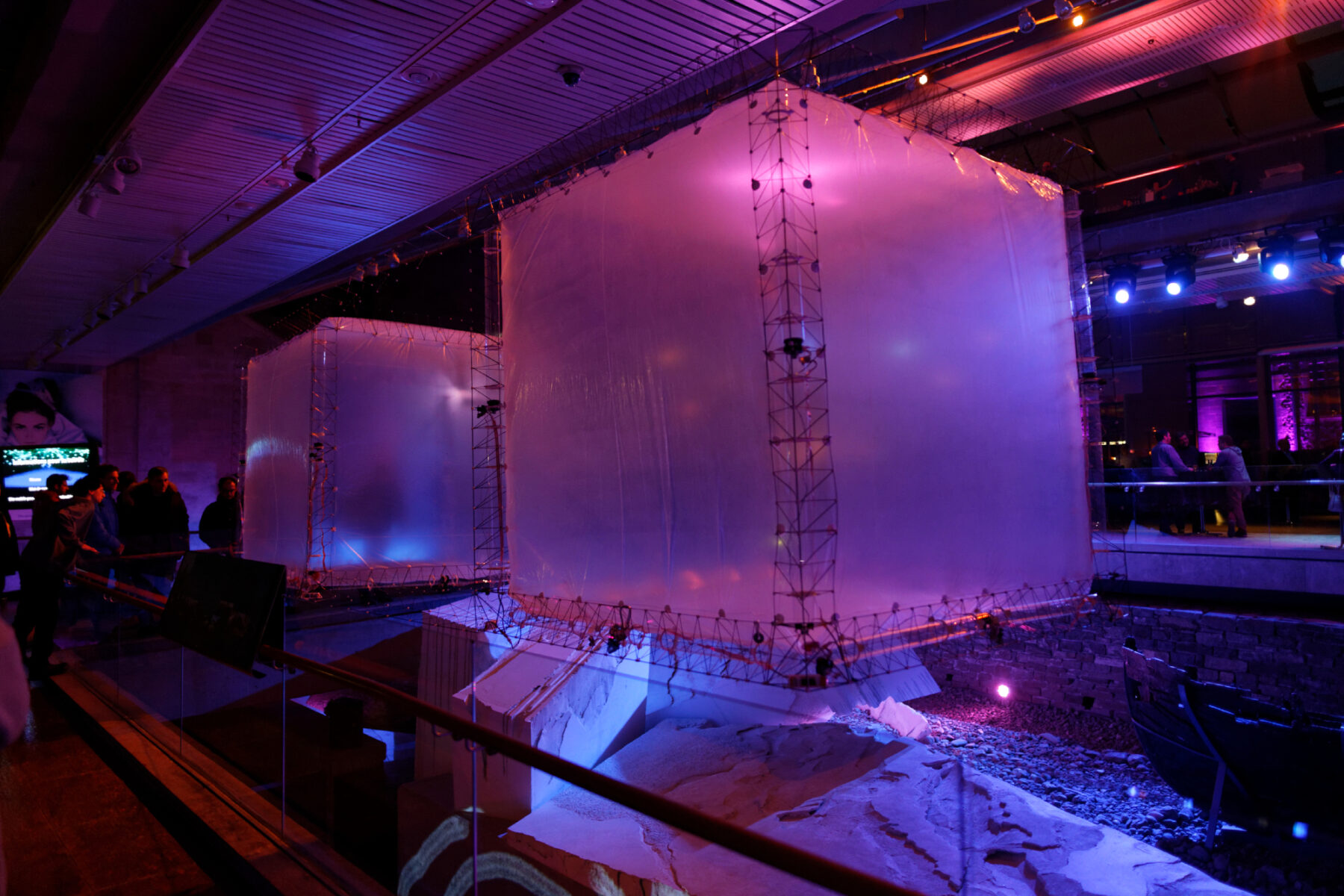
Le projet consiste à développer une plateforme mécatronique intelligente concrétisée par de multiples dirigeables géométriques — des cubes — qui flottent et se déplacent dans les airs. Le contexte artistique de ce projet nécessite plusieurs avancées techniques, surtout en ce qui a trait aux systèmes de localisation et de contrôle, à la dynamique de vol et aux stratégies d’interaction. Ces avancées ont été développées lors de périodes d’activités collectives, appelées “résidences collectives de recherche-création”, durant lesquelles des artistes, des ingénieurs et des interprètes travaillent en étroite collaboration, parfois pendant plusieurs semaines. Ces résidences ont encouragé des échanges fructueux entre tous les collaborateurs, mais ont surtout été une manière unique et créative d’orienter et de concentrer le développement robotique.
Les Tryphons sont constitués d’une structure de 2,25 mètres en fibres de carbone avec une enceinte remplie à l’hélium, ce qui leur confère une grande autonomie pour des installations à long terme. Les Tryphons ont été présentés dans de nombreux événements internationaux dans le monde, notamment lors des Étés de la Danse à Paris, alors qu’ils planaient au-dessus d’une foule qui dansait et qu’ils présentaient des projections vidéo sur leurs faces carrées, et lors de l’événement Science as Suspense à Moscou. À chacune de leurs apparitions publiques, le comportement et l’environnement des Tryphons étaient différents et nécessitaient donc des développements techniques particuliers.
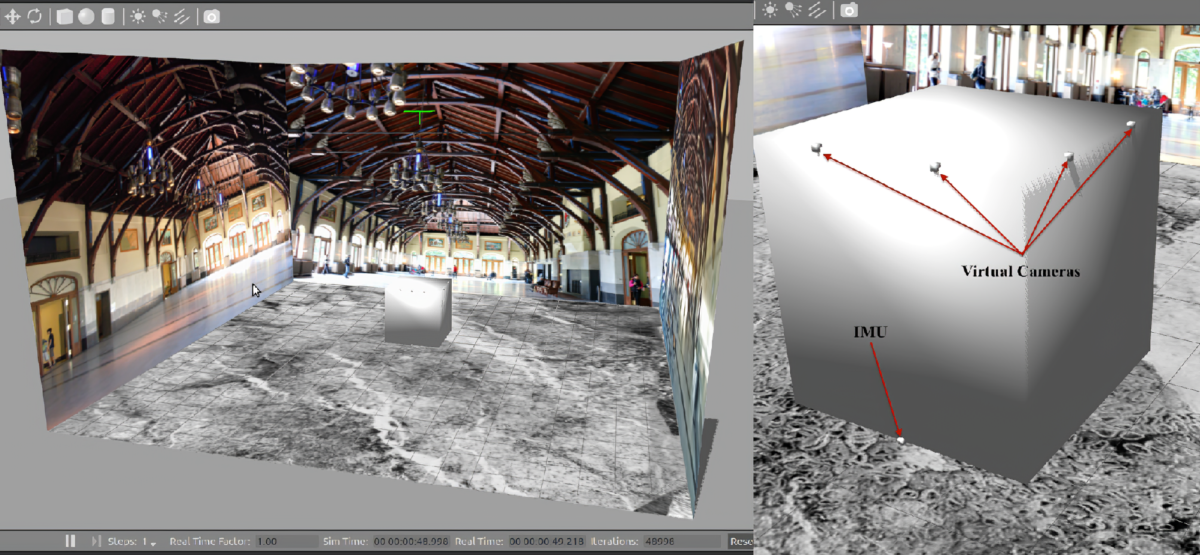
Afin d’augmenter le potentiel de performance des véhicules flottants, d’accroître leur autonomie et de limiter le temps d’adaptation et de calibration requis pour chaque nouvel environnement, trois laboratoires d’ingénierie robotique ont commencé à travailler avec les artistes sur les défis particuliers de la localisation, du contrôle précis et de l’interactivité des Tryphons.
Oscillant constamment entre la transparence aride et la précision absolue des équations mathématiques, d’une part, et les interprétations libres et poétiques d’êtres artificiels délibérément confondus avec des organismes biologiques conscients et en interaction, d’autre part, le projet a progressivement réussi à développer et à intensifier les contacts, la communication et les échanges entre des domaines culturels généralement considérés étrangers l’un de l’autre. Il aborde directement la problématique de la relation entre des événements strictement formels, comme la rotation spatiale d’un objet, et les interprétations émotionnelles que de tels événements peuvent déclencher. À travers de multiples échanges et expérimentations, les robots Aérostabiles ont ouvert un vaste champs de recherche dans lequel des groupes issus de disciplines diverses apprennent à cohabiter et sur lesquels les cubes volants se présentent comme des catalyseurs d’échanges disciplinaires et méthodologiques, transformant ainsi leur identité technologique en un médium largement poétique, devenant une plaque tournante autour de laquelle de nouveaux modes de discussion peuvent avoir lieu.
[ VOILES | SAILS ]: A modular architecture for a fast parallel development in an international multidisciplinary project
David St-Onge, NXI Gestatio
ConsulterDevelopment of aerobots for satellite emulation, architecture and art
David St-Onge, NXI Gestatio, McGill Aerospace Mechatronics Lab
ConsulterAEROSTABILES : A new approach to HRI researches
David St-Onge, McGill Aerospace Mechatronics Lab, Nicolas Reeves
ConsulterDynamic modelling and control of a cubic flying blimp using external motion capture
David St-Onge, NXI Gestatio
ConsulterControl, localization and human interaction with an autonomous lighter-than-air performer
David St-Onge, McGill Aerospace Mechatronics Lab, Nicolas Reeves
Consulter