Recherches
Exploration planétaire ergonomique avec groupes de robots
Année
En cours
Axe de recherche
Aérospatiale
Interaction personne-machine
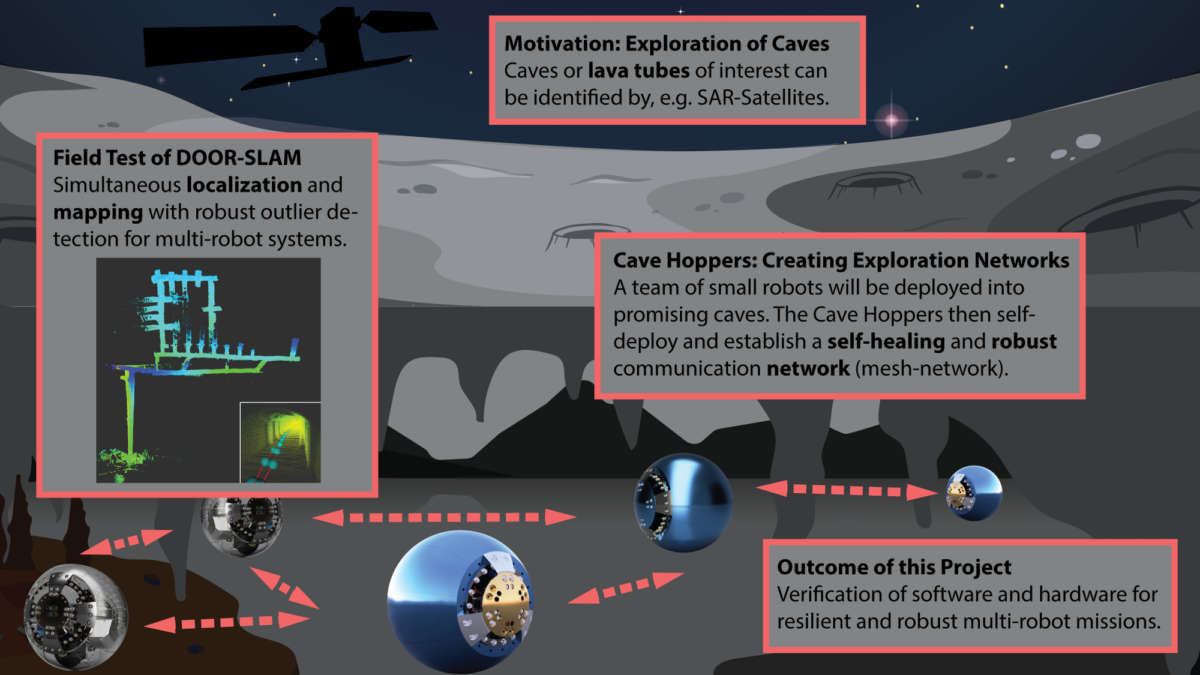
L’objectif général du projet est de valider l’infrastructure de communication, de cartographie, de localisation et de coordination afin de permettre à un seul opérateur de contrôler un groupe de robots d’exploration dans un environnement opérationnel. En outre, nous allons tester un nouveau robot-sauteur pour l’exploration de cavernes. Basé sur une conception sphérique, il sera muni d’une coque résistante aux collisions, d’un système pour le contrôle de la locomotion permettant aux robots de rouler dans toutes les directions et d’un mécanisme de saut à ressort.
Plus le nombre de robots contrôlés par un superviseur humain augmente, plus la charge de travail augmente. Pour une flotte de robots, les ressources cognitives seraient rapidement saturées. Une autonomie accrue des robots peut réduire cette charge de travail et maintenir les performances du système. Toutefois, il est probable que l’assistance et l’intervention humaines soient essentielles dans un avenir proche, et même souhaitables de façon permanente, puisque l’humain peut aider à résoudre des problèmes complexes. Il est important de noter que l’automatisation modifie non seulement la charge de travail, mais également, et de manière spectaculaire, la nature des tâches cognitives. De plus, dans les essaims, les comportements auto-organisés de la flotte sont source de confusion pour l’opérateur. Une interaction personne-flotte efficace nécessite d’optimiser la répartition cognitive du travail et la communication.
Neuromuscular performance and injury risk assessment using fusion of multimodal biophysical and cognitive data : In-field athletic performance and injury risk assessment
David St-Onge, Nerea Urrestilla Anguiozar, Rachid Aissaoui
ConsulterTowards evaluating the impact of swarm robotic control strategy on operators’ cognitive load
David St-Onge, Giovanni Beltrame, Coffey Lab: audition, sleep & plasticity, Anita Paas
ConsulterMeasuring cognitive load : Heart-rate variability and pupillometry assessment
Nerea Urrestilla Anguiozar
ConsulterPlanetary exploration with robot teams : Implementing Higher Autonomy With Swarm Intelligence
David St-Onge, MIST Lab, Coffey Lab: audition, sleep & plasticity
Consulter