Researches
Ergonomic planetary exploration using groups of robot
Year
In progress
Research axis
Aerospace
Human-machine interaction
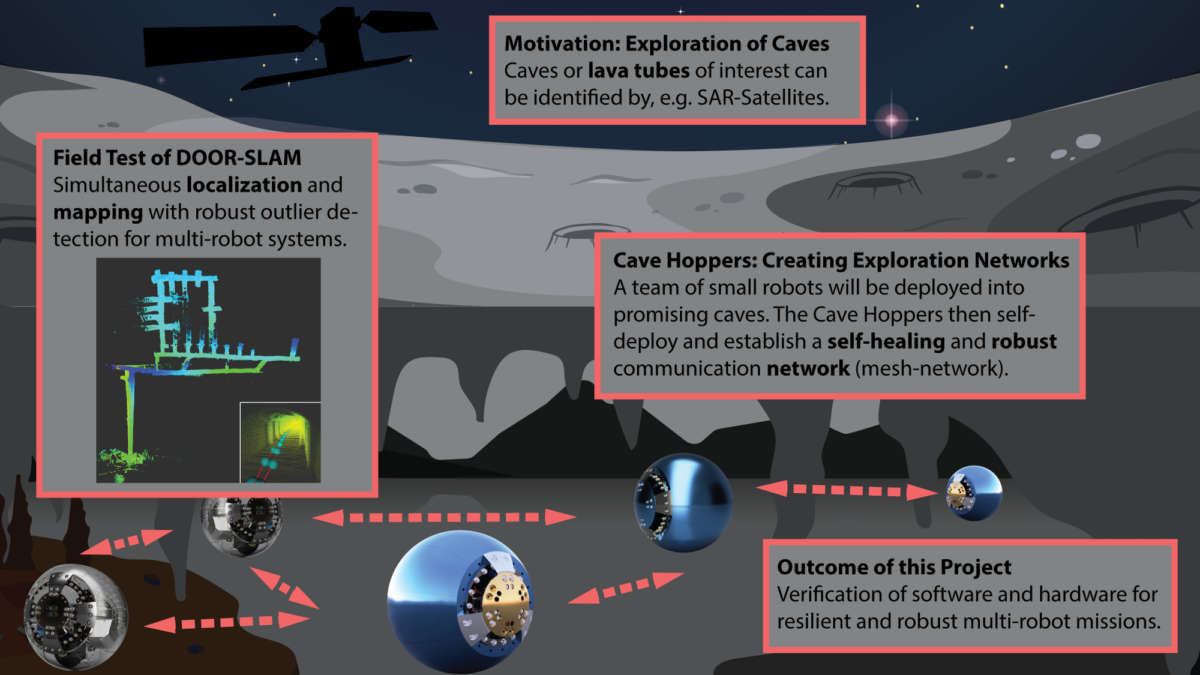
The overall goal of the project is to validate the communication, mapping, localization, and coordination infrastructure in order to allow a single operator to control a group of exploration robots, in an operational environment. In addition, we will test a novel cave-hopper robot, based on a spherical design, with a collision-tolerant shell, a system for controlling locomotion that allows the robot to roll in any direction, and a spring-loaded jumping mechanism.
As the number of robots to be controlled by a human supervisor increases, so does the workload. For a fleet of robots, the cognitive resources would quickly become saturated. Increasing robot autonomy can reduce this workload and maintain system performance. However, human guidance and intervention are likely to be required for the foreseeable future, and possibly desirable permanently, as humans can help solve complex and computationally difficult problems. It is worth nothing that the process of automation not only changes the workload, but also dramatically alters the nature of the cognitive tasks. Moreover, in swarm systems, the self-organizing behaviours of the fleet are confusing to the operator. Effective human-fleet interaction requires the optimization of communication and the cognitive division of labour.
Neuromuscular performance and injury risk assessment using fusion of multimodal biophysical and cognitive data: In-field athletic performance and injury risk assessment
David St-Onge, Nerea Urrestilla Anguiozar, Rachid Aissaoui
ReadTowards evaluating the impact of swarm robotic control strategy on operators’ cognitive load
David St-Onge, Giovanni Beltrame, Coffey Lab: audition, sleep & plasticity, Anita Paas
ReadMeasuring cognitive load: Heart-rate variability and pupillometry assessment
Nerea Urrestilla Anguiozar
ReadPlanetary exploration with robot teams: Implementing Higher Autonomy With Swarm Intelligence
David St-Onge, MIST Lab, Coffey Lab: audition, sleep & plasticity
Read