Recherches
Bâti immobilier modélisé aidé par des robots mobiles
Année
En cours
Depuis plusieurs décennies, l’industrie de la construction souffre d’une faible productivité, notamment par rapport aux industries manufacturières qui ont réussi à bénéficier de la numérisation de leurs processus. En outre, la pénurie de main-d’œuvre qualifiée est attendue dans un proche avenir.
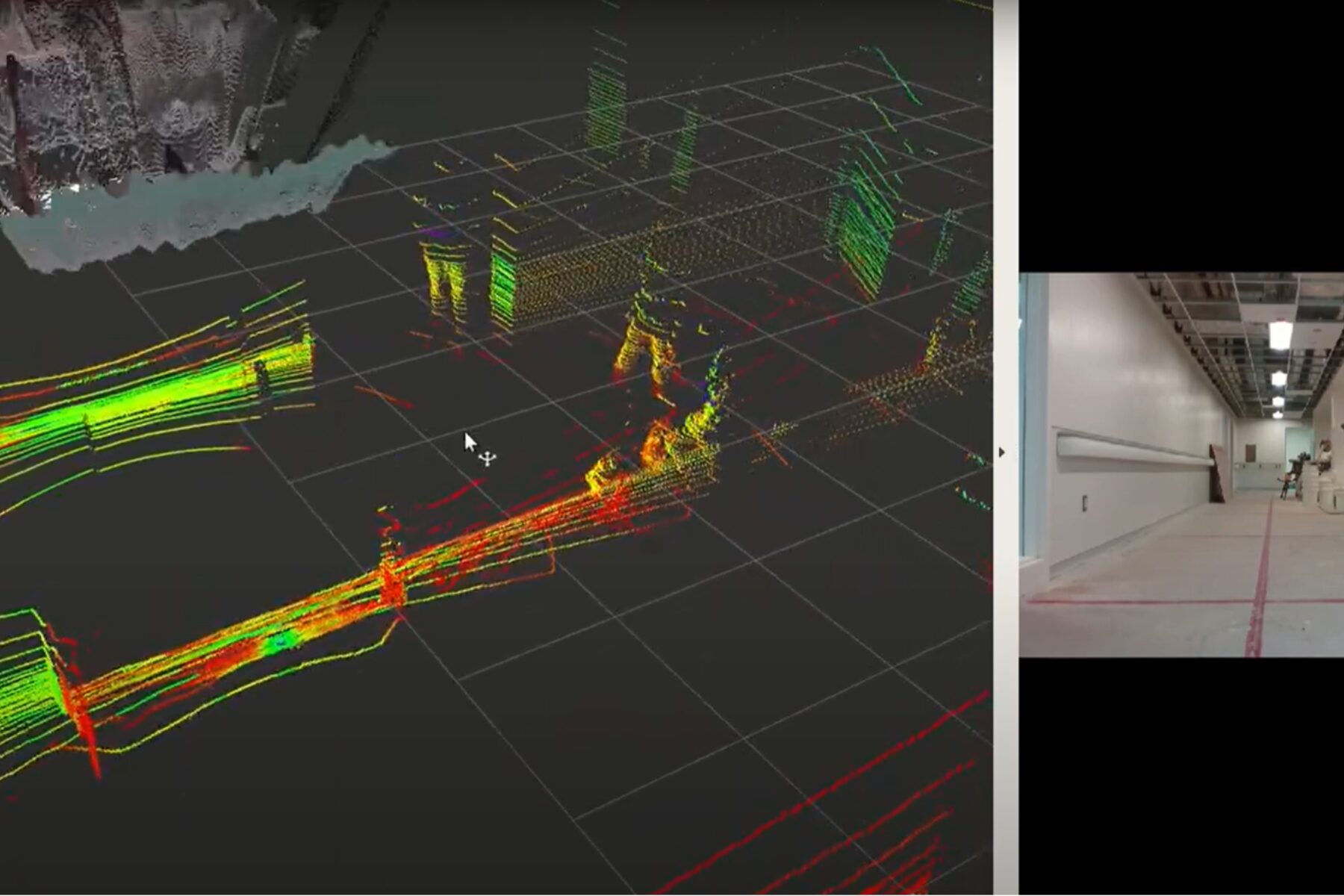
Ce projet explore l’utilisation de robots mobiles sur les chantiers de construction, dans le but d’accélérer les travaux de construction, de réduire les coûts et de libérer le potentiel humain à affecter à des travaux plus cruciaux. Les robots (tels le Husky de Clearpath utilisé dans un projet de Scaled Robotics) peuvent collecter des données sur le processus de construction qui peuvent être intégrées dans le système de gestion de la construction, aidant au contrôle de la progression, à l’identification des défauts, au suivi des matériaux et à la prise de décision.
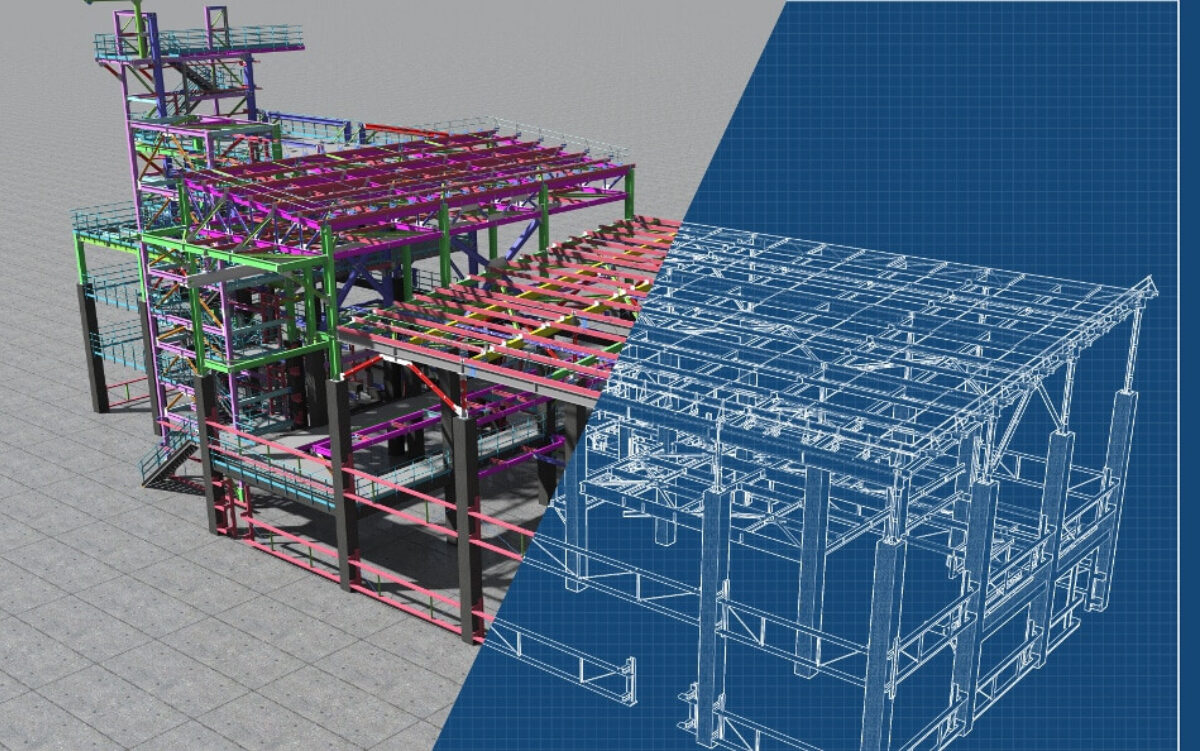


La modélisation des informations du bâtiment (BIM — représenté dans une image de LetsBuild ci-haut) et le système d’information géographique (SIG) sont des cadres qui collectent et gèrent les informations sur le processus de construction et sont désormais une nécessité pour de tels projets. Une intégration entre le BIM et le SIG fournit une représentation numérique de l’environnement bâti que les robots peuvent utiliser à des fins de positionnement.
Ce projet (en cours de réalisation avec un partenaire industriel) cherche un moyen de naviguer de manière autonome sur des robots mobiles sur les chantiers et de collecter des données intégrables dans le BIM et le SIG. Il existe de nombreux défis à relever, non seulement le fait d’éviter les collisions avec des objets qui ne sont pas définis dans le BIM, par exemple, mais aussi celui d’intégrer les différents types de données – BIM, SIG et le nuage de points 3D collectés par le robot. Une grande attention est également accordée à la sécurité, et les aspects de sécurité des robots mobiles travaillant avec les humains sont à l’étude
Ontology-based approach to data exchanges for robot navigation on construction sites
Ivanka Iordanova, Sina Karimi
ConsulterFramework for automation of construction progress tracking on indoor environment, using autonomous rover and beacon-based system
David St-Onge, Ivanka Iordanova
ConsulterFrom safety standards to safe operation with mobile robotic systems deployment
Ivanka Iordanova, Tatiana Wanang Siyapdjie, Bruno Belzile, Rafael Gomes Braga, Sina Karimi, David St-Onge
ConsulterSemantic optimal robot navigation using building information on construction sites
Sina Karimi, Ivanka Iordanova, Rafael Gomes Braga, David St-Onge
ConsulterIntegration of BIM and GIS for construction automation, a systematic literature review (SLR) combining bibliometric and qualitative analysis
Ivanka Iordanova, Sina Karimi
Consulter