Researches
Mobile Robots for Enhanced Building Information Modelling
Year
In progress
For several decades now, the construction industry has suffered from low productivity, especially compared to manufacturing industries which have benefitted from process automation. Furthermore, lack of a qualified workforce is expected in the near future.
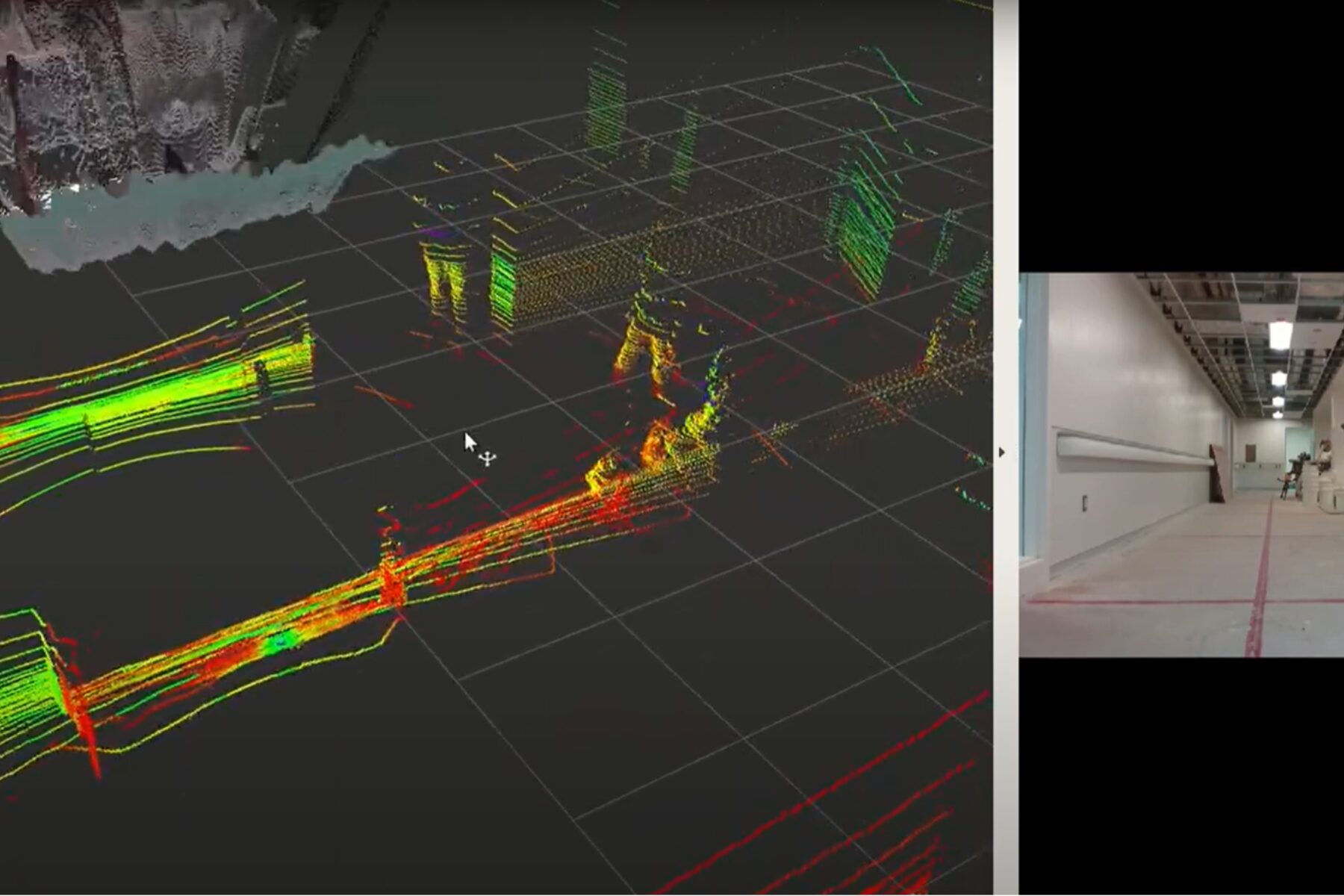
This project explores the use of mobile robots on construction sites, aiming to speed up construction work, reduce costs and free up human resources to be assigned to more crucial work. Robots (such as the Clearpath Husky used in a Scaled Robotics project) can collect data about the construction process that can be integrated into the construction management system, helping with progress control, defects identification, material tracking and decision making.
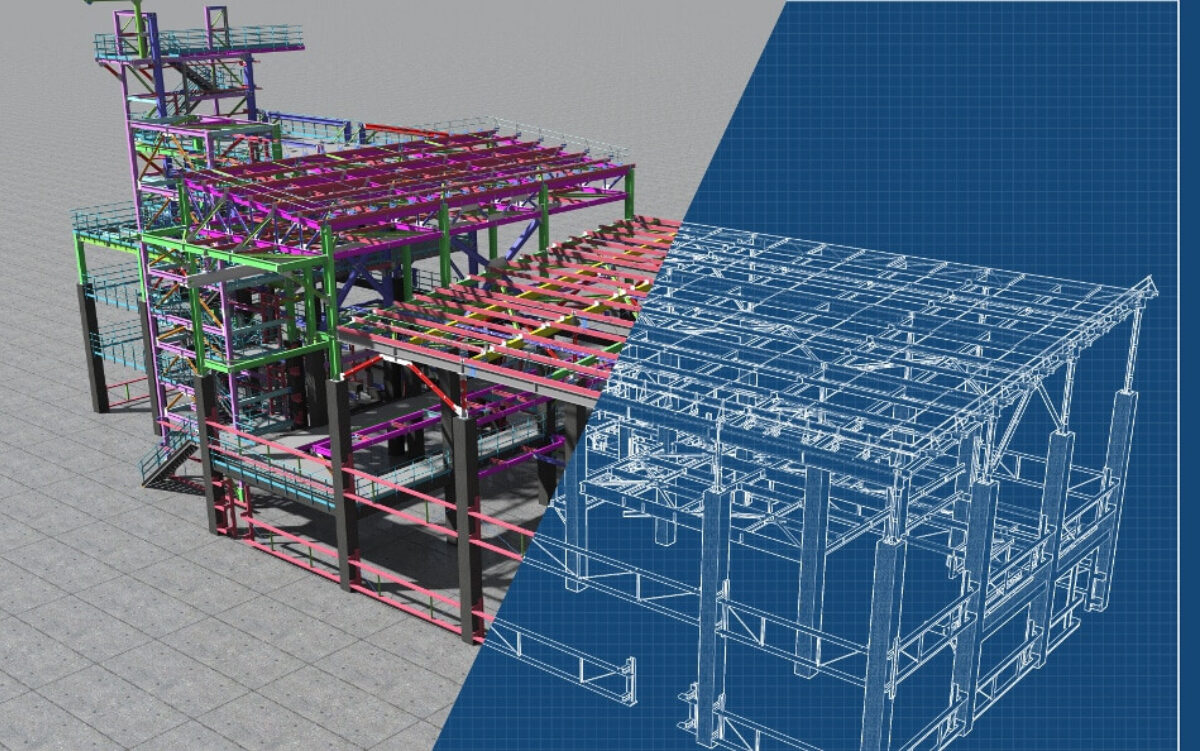


Building Information Modelling (BIM — represented in the LetsBuild image above) and Geographic Information System (GIS) are frameworks that collect and manage information about the construction process, and are now a necessity for such projects. An integration between BIM and GIS provides a digital representation of the built environment that robots can utilize for positioning purposes.
This project (being carried out with an industrial partner) seeks a way to autonomously navigate mobile robots on construction sites and collect data that can be integrated into the BIM and GIS. There are many challenges to be faced — for example, avoiding collisions with objects that are not defined in the BIM — but also regarding the integration between the different types of data — BIM, GIS and the 3D point cloud collected by the robot. Safety is also a paramount concern, and the safety aspects of mobile robots working alongside humans are being investigated.
Ontology-based approach to data exchanges for robot navigation on construction sites
Ivanka Iordanova, Sina Karimi
ReadFramework for automation of construction progress tracking on indoor environment, using autonomous rover and beacon-based system
David St-Onge, Ivanka Iordanova
ReadFrom safety standards to safe operation with mobile robotic systems deployment
Ivanka Iordanova, Tatiana Wanang Siyapdjie, Bruno Belzile, Rafael Gomes Braga, Sina Karimi, David St-Onge
ReadSemantic optimal robot navigation using building information on construction sites
Sina Karimi, Ivanka Iordanova, Rafael Gomes Braga, David St-Onge
ReadIntegration of BIM and GIS for construction automation, a systematic literature review (SLR) combining bibliometric and qualitative analysis
Ivanka Iordanova, Sina Karimi
Read