Recherches
DESSAIM - chorégraphie d'essaims
Axe de recherche
Interaction personne-machine
Le collectif DESSAIM réunit des ingénieurs spécialisés en robotique, informatique et biomécanique, des artistes issus de la danse, du mouvement, de la marionnette et du théâtre d’objets, ainsi que des experts en analyse fonctionnelle et expressive du mouvement et en enseignement-apprentissage. Ensemble, ils explorent les possibilités expressives offertes par les variations de mouvement dans des essaims robotiques aériens et terrestres. Un documentaire de 25 minutes, réalisé par Maxime Pelletier-Huot, suit l’évolution du projet et de l’équipe d’artistes et d’ingénieurs. Ce documentaire est disponible sur demande, et sa bande-annonce est accessible ci-dessous.
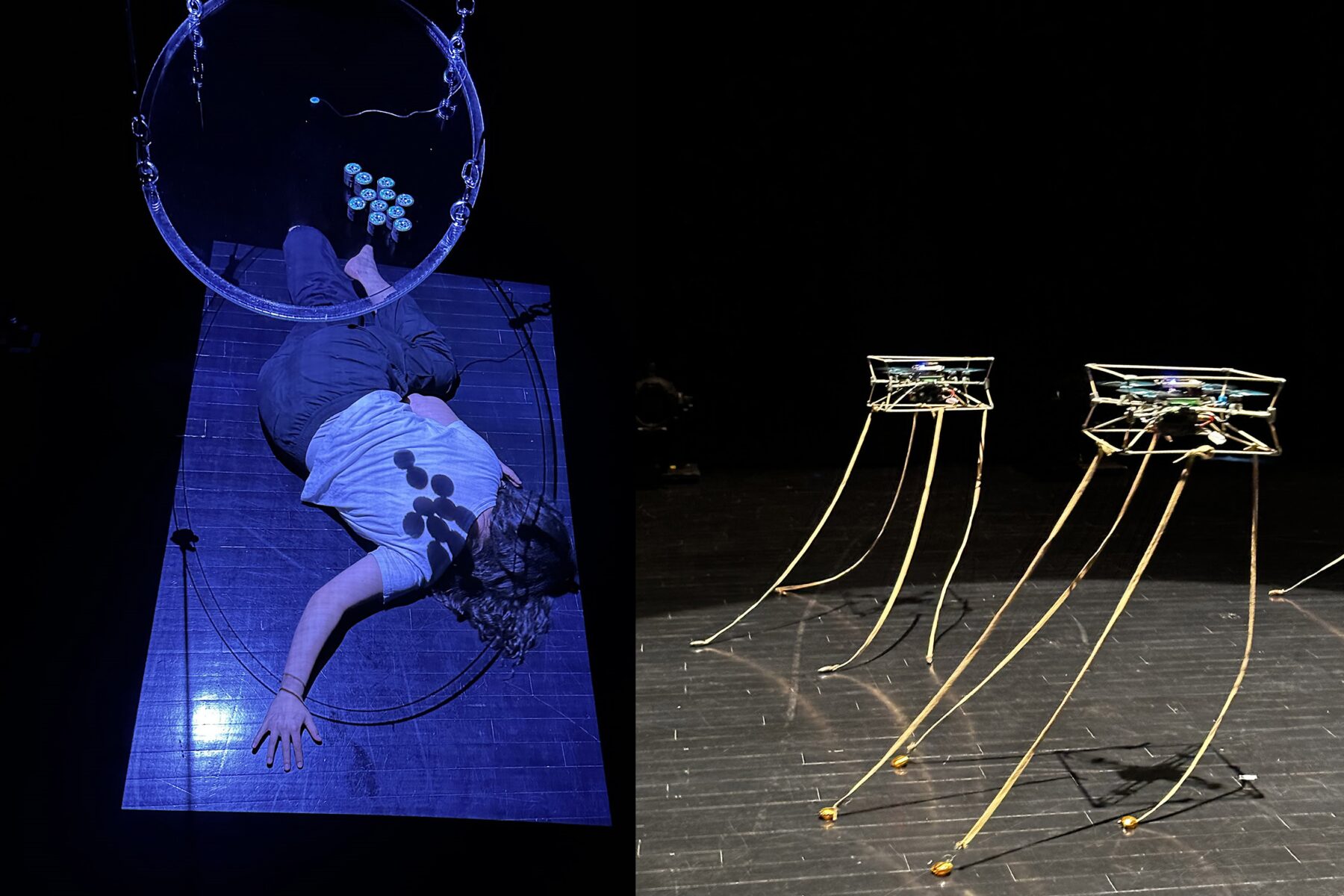
Le projet, financé par le programme PRISME-ART du FRQ, rassemble les membres de l’équipe dans un collectif essaimique travaillant avec trois types d’essaims robotiques : 1) les CrazyCognies (petits aéronefs), 2) les Doodys (plateformes à roues surmontées d’un bras robotique Kinova), et 3) les Zooids sur table. Une écriture chorégraphique est mobilisée pour orchestrer la rencontre de ces essaims robotiques avec des essaims humains en mouvement (les publics-participants). Lors de nos explorations inter-essaims, la fonctionnalité des entités robotiques est détournée pour révéler leur expressivité à travers des variations de leurs qualités dynamiques. Des matériaux récupérés et recyclés transforment leur apparence et leur environnement, leur permettant de devenir, ensemble ou individuellement, une matière expressive et poétique, en mouvement constant. Les performances-installations issues de ces explorations en relation avec l’humain offrent la possibilité de transformer la perception des publics envers les robots, voire de susciter une empathie pour le mouvement de ces êtres artificiels et de ces matériaux. Les vidéos ci-dessous présentent un résumé des explorations réalisées sur les Zooids, suivi des explorations sur les CrazyCognies.