Recherches
Scutigère
Année
En cours
Axe de recherche
Aérospatiale
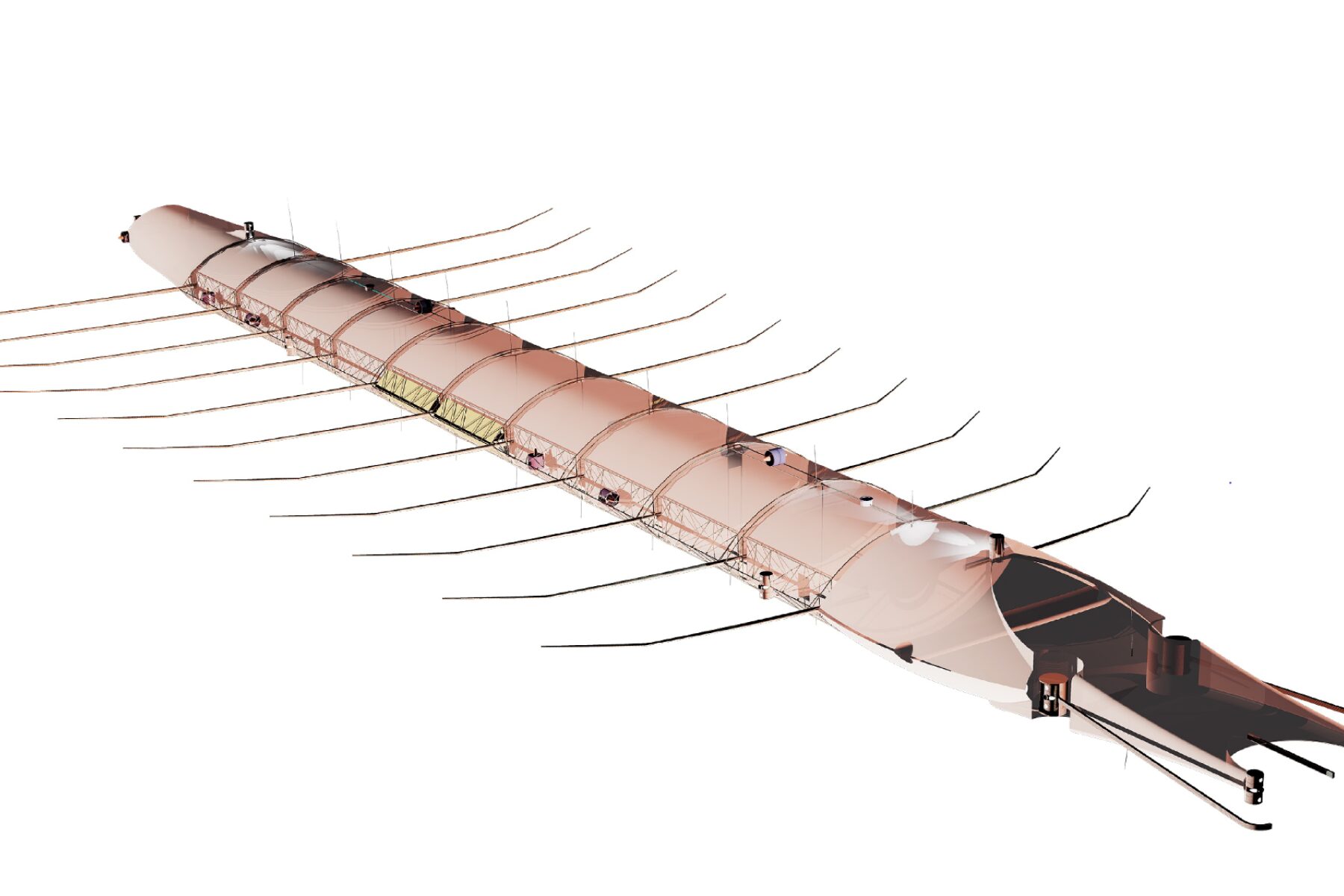
Scutigera, ou la Scutigère, est un automate volant, intelligent et interactif conçu pour des installations et des performances dans de vastes espaces intérieurs : salles ou galeries souterraines naturelles, sites archéologiques, vestiges industriels, anciens espaces architecturaux… Cet aérostabile, hybride sophistiqué et biomorphique de drone et de dirigeable, devra trouver sa route sans assistance humaine, même dans des espaces situés hors de vue et inaccessibles, pour transmettre en temps réel les images, les vidéos, les sons et les données captés durant ses vols.
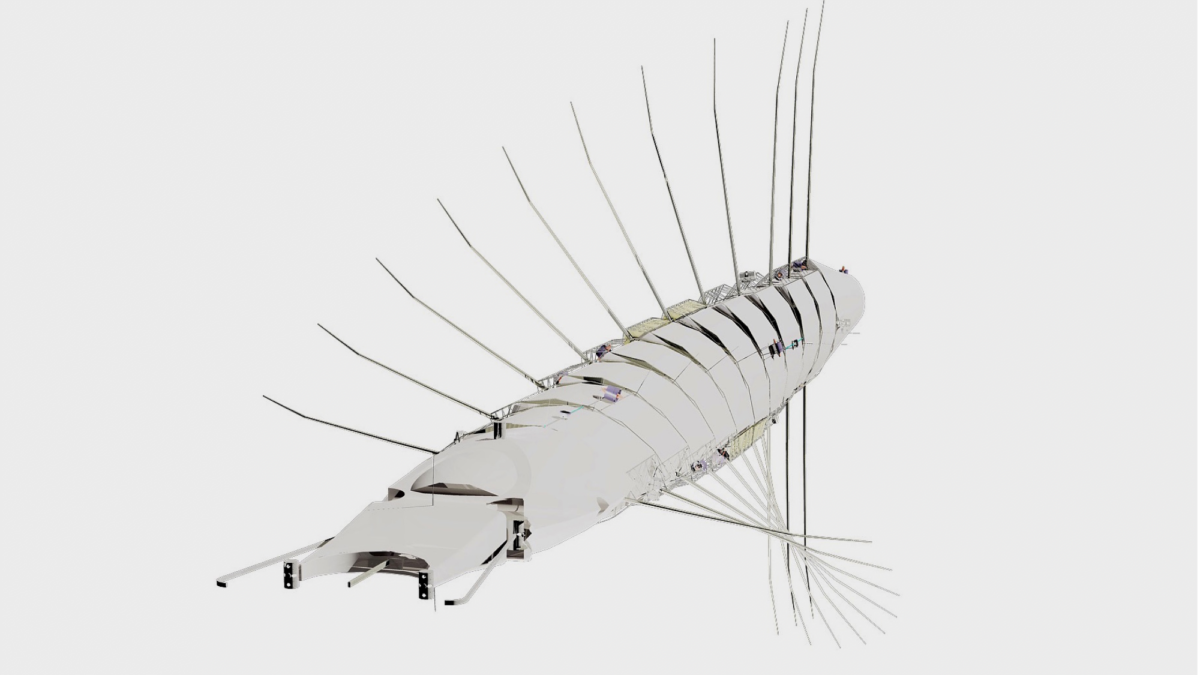
La conception est inspirée d’un arthropode, le Scutigera coleoptrata, un mille-pattes à longues jambes que l’on trouve couramment dans nos maisons. Au lieu de ramper sur les murs comme son homologue biologique, le robot Scutigera plane dans les tunnels de grottes. Mobile et flexible, il s’agit en réalité d’un véhicule semi-rigide, segmenté, plus léger que l’air, capable de supporter une exploration longue et en douceur des grottes tout en transmettant en temps réel les images et les sons qu’il capte. L’un des principaux défis liés à l’exploration souterraine est la nécessité de transporter l’équipement à travers des tunnels étroits jusqu’à la zone d’inspection. L’appareil doit être léger et compact pour faciliter le transport. À l’arrivée à la zone de lancement, il doit être déployé efficacement, c’est-à-dire sans nécessiter de compétences techniques poussées ni une opération complexe. À cette fin, notre conception s’appuie sur deux principes mécaniques :
1. déployable : un exosquelette rigide plié pour le transport et déployé sur place en gonflant simplement le dirigeable ;
2. modulaire : un ensemble de modules identiques qui peuvent être adaptés à la mission et rapidement attachés les uns aux autres.
Le projet Scutigère fait suite à l’expérimentation concluante des Tryphons (robots cubiques volants) dans la caverne de La Verna, en France.