Researches
Scutigera
Year
In progress
Research axis
Aerospace
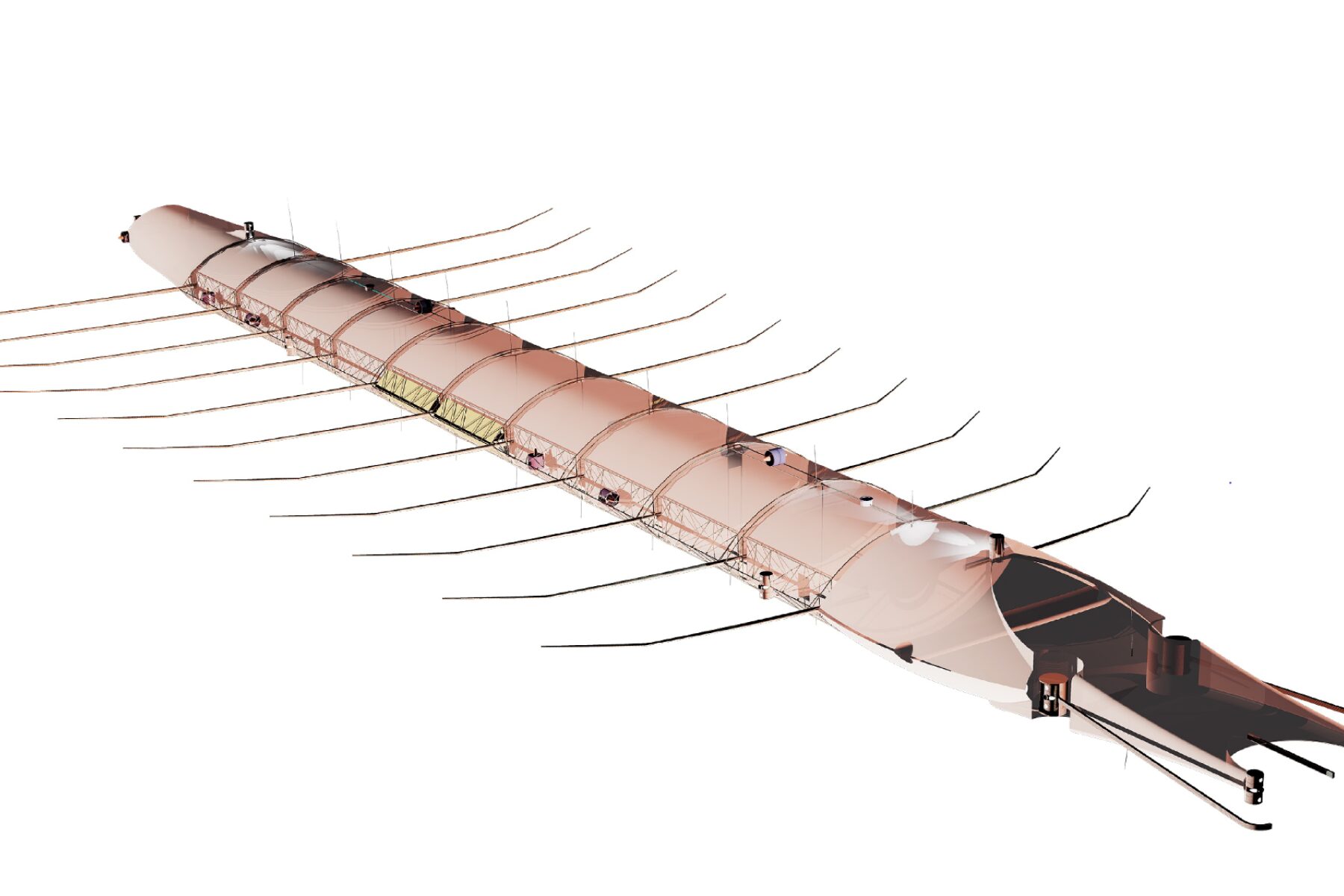
Scutigera is an intelligent and interactive flying automaton intended for installation and operation in large indoor spaces: natural underground rooms or galleries, archaeological sites, industrial remains, disused built spaces… This aerostabile, a sophisticated and biomorphic hybrid of a drone and an airship, must find its way without human assistance, even in out-of-sight and inaccessible spaces, and transmit in real time the images, video, sounds and data captured during its flights.
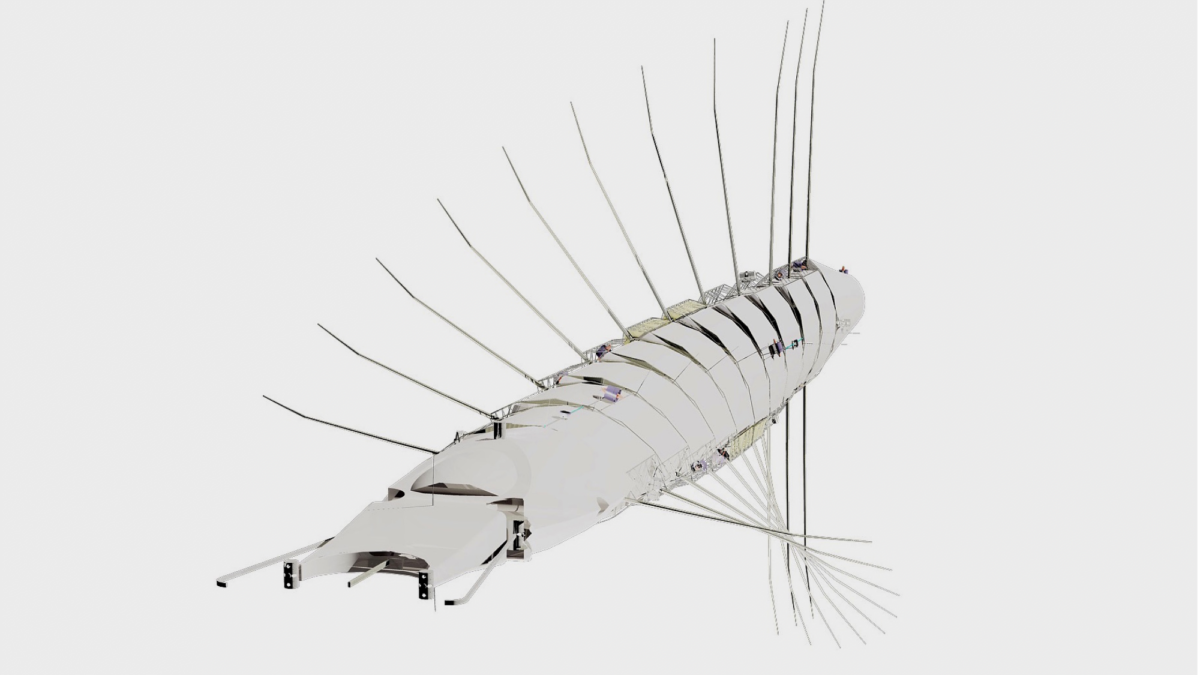
The design is inspired by an arthropod, Scutigera coleoptrata, a long-legged centipede commonly found in our homes. Instead of crawling on walls like its biological counterpart, the robotic Scutigera hovers in cave tunnels. Mobile and flexible, it is basically a semi-rigid, segmented, lighter-than-air vehicle that can withstand long, smooth exploration of caves while transmitting in real time the images and sounds that it captures. One of the major challenges of subterranean exploration is the need to convey equipment through narrow tunnels to the inspection zone. The apparatus must be light and compact for easy transport. On arrival at the launch zone, it must be deployed efficiently, i.e. without requiring advanced technical skill or complex operation. For this purpose, our design enlists two mechanical principles:
1. Deployable: a rigid exoskeleton folded for transport and deployed on site by simply inflating the airship,
2. Modular: a set of identical modules adaptable to the mission and quickly connected to one another.
The Scutigera project follows the conclusive testing of Tryphons (flying cubic robots) in the La Verna cave in France.