Laboratory
of Intuitive
and Natural
Interaction
with
Teleoperated
Robots
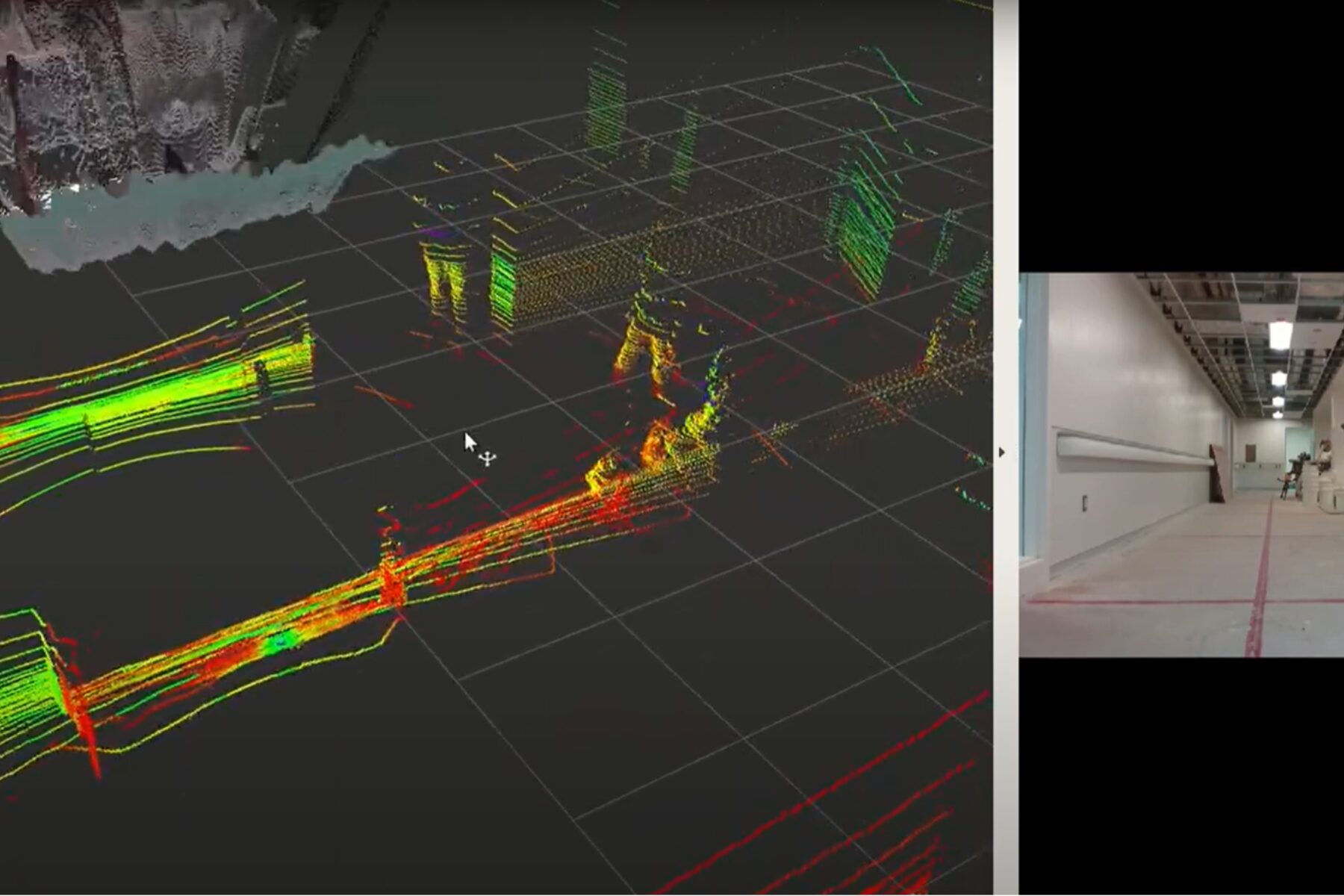


Robotic simulators
With all the robotic simulators on the market, how to select the most suitable? Student Mohamed Bentakkouk tested them all as part of his project with Innovem.
See the resultsFrom Design to Deployment: Decentralized Coordination of Heterogeneous Robotic Teams
ReadPlanetary exploration with robot teams: Implementing Higher Autonomy With Swarm Intelligence
David St-Onge, MIST Lab, Coffey Lab: audition, sleep & plasticity
ReadEngaging with robotic swarms: commands from expressive motion
David St-Onge, MIST Lab, Centre for Interdisciplinary Studies in Rhythm, Time and Motion
ReadSynthesis and design of a one degree-of-freedom planar deployable mechanism with a large expansion ratio
David St-Onge
Read