Laboratoire
d'Interaction
Naturelle
et Intuitive
pour la
Téléopération
de Robots


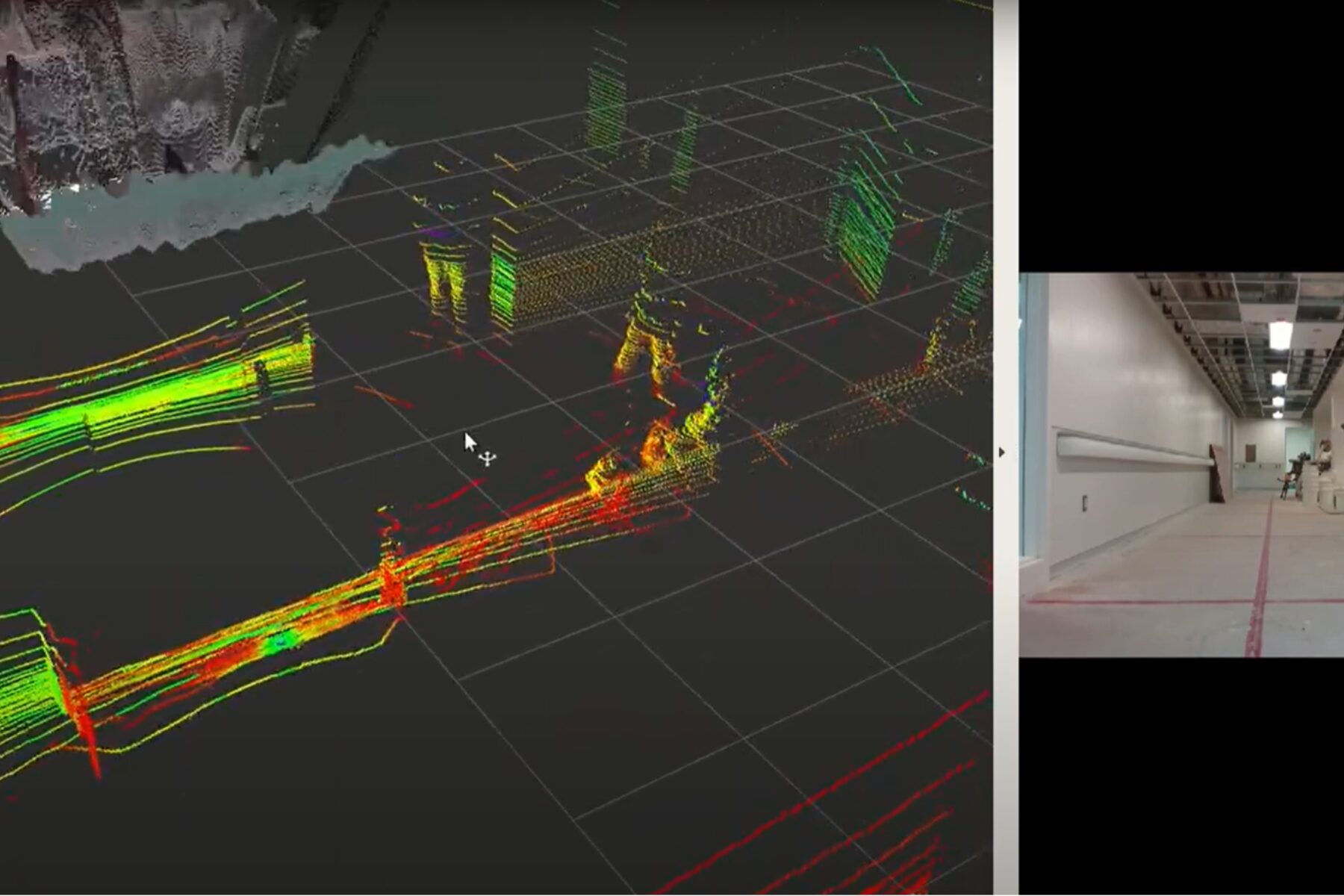
Simulation de robots peintres
Avec tous ces simulateurs robotiques sur le marché, comment déterminer le plus approprié ? L’étudiant Mohamed Bentakkouk les a tous testé dans le cadre de son projet avec Innovem.
Voir les résultatsFrom Design to Deployment : Decentralized Coordination of Heterogeneous Robotic Teams
ConsulterPlanetary exploration with robot teams : Implementing Higher Autonomy With Swarm Intelligence
David St-Onge, MIST Lab, Coffey Lab: audition, sleep & plasticity
ConsulterEngaging with robotic swarms : commands from expressive motion
David St-Onge, MIST Lab, Centre for Interdisciplinary Studies in Rhythm, Time and Motion
ConsulterSynthesis and design of a one degree-of-freedom planar deployable mechanism with a large expansion ratio
David St-Onge
Consulter