Introduction
Efficient swarm robot collaboration relies on precise relative localization, especially in challenging environments like GPS-denied indoor spaces. This research compares the localization accuracy of four methods—IR-based, visual-inertial, ultra-wideband, and a spatial foundation model-based systems. We evaluate these methods through simulations and real-world experiments involving flying and ground robots performing collective behaviors. Key insights include localization accuracy, deployment cost, communication overhead, and behavioral performance. By exploring both direct (sensor-based) and indirect (communication-based) techniques, this work advances understanding of localization methods for multi-robot systems, paving the way for improved swarm robotics applications.
Explore this page to find more about the methods and behaviors explored.
Swarm Behaviors
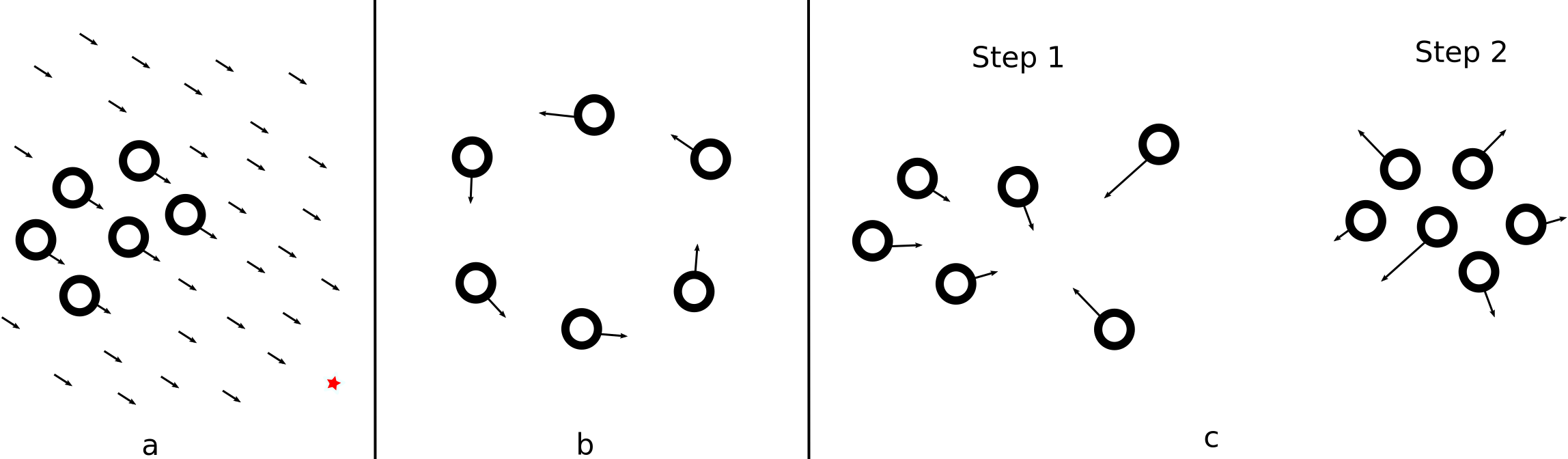
Swarm robotics relies on decentralized algorithms to produce emergent behaviors through local interactions between robots and their environment. We selected three behaviors for this study:
- Lennard-Jones Potential: Robots use attractive and repulsive forces to maintain cohesion while avoiding collisions, resembling bird flocking (a).
- Cyclic Pursuit: A simple rule-based behavior where robots adjust their paths to form smooth circular motion (b).
- Fireworks: A hybrid behavior of aggregation and dispersion, mimicking explosive-like motion. This stresses localization systems due to repetitive movements and close proximity (c).
These behaviors highlight the flexibility of swarm robotics and serve as benchmarks to evaluate localization methods in dynamic, decentralized settings.
Localization Methods
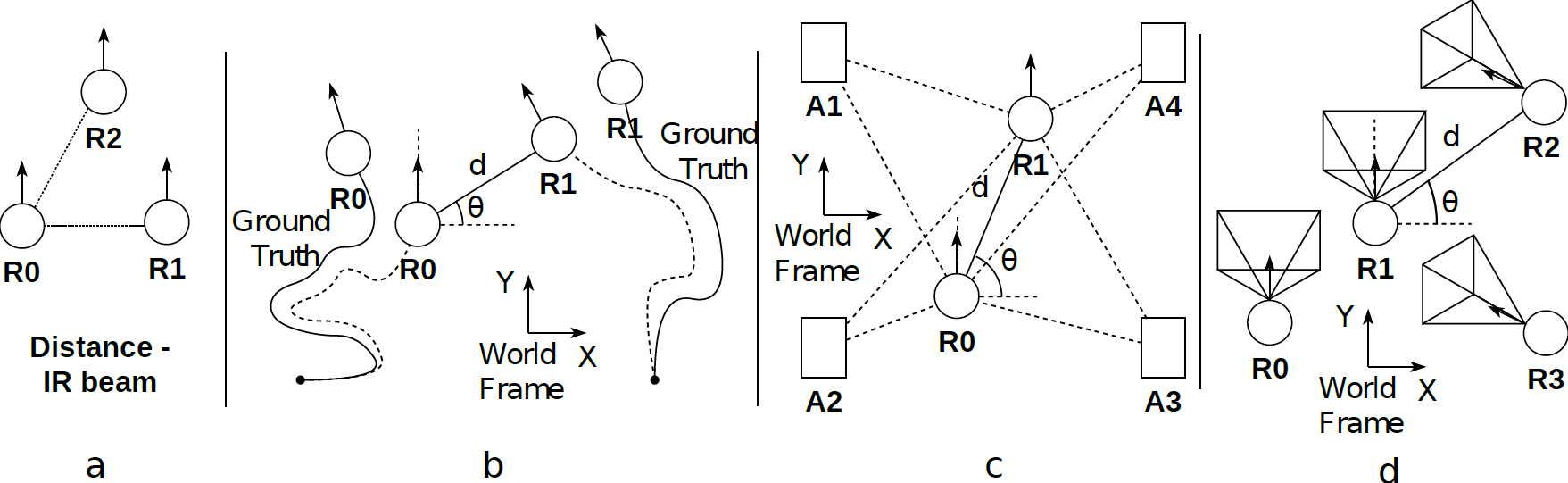
Localization methods for swarm robots can be divided into direct and indirect methods, as shown in the figure below. We evaluated the following localization methods for this study:
- Infrared (IR): Robots use IR transceivers to directly measure the range and bearing of neighbors. While simple and effective, these methods often suffer from limited bearing resolution and sensing noise.
- Ultra-wideband (UWB): UWB transceivers rely on time-of-flight or signal strength to estimate positions. UWB works well in low-light environments but may struggle to scale with larger swarms.
- Visual-Inertial SLAM: Combines visual features with inertial measurements to localize robots within a shared reference frame. This method is robust but depends on illumination and environmental features.
- CoViS-Net: A deep-learning-based model for real-time pose estimation using monocular images. It provides pose predictions with uncertainty quantification, offering a novel infrastructure-less approach for swarm localization.
These methods were tested through large-scale simulations and experiments with ground and flying robots to evaluate their performance in dynamic, decentralized scenarios.
Simulation Results
The simulation results demonstrate the performance of different localization methods in a range of robotic swarm behaviors. Cartesian and polar visualizations were used to illustrate these methods, offering unique insights into robot trajectories. The RMSE values for these methods are prsented in the table and we present the plots for IR-Simulted and UWB-Simulated methods below.
Pursuit with IR Simulated
Pursuit with UWB Simulated
Pursuit with Visual sensors
Pursuit
Fireworks
| Methods | Pursuit | Fireworks | Lennard-Jones | |||
|---|---|---|---|---|---|---|
| Range | Bearing | Range | Bearing | Range | Bearing | |
| IR | 0.0803 | 0.2305 | 0.0798 | 0.2232 | 0.0795 | 0.2505 |
| UWB | 0.1001 | 0.09312 | 0.0939 | 0.08238 | 0.1204 | 0.09632 |
| CoVis-Net | N/A | N/A | 0.8422 | 1.244 | 0.9179 | 0.9510 |
| ORB-SLAM | 0.33237 | 0.3404 | 0.08213 | 0.1053 | 0.08527 | 0.03589 |
Real Robots
Two swarms, one terrestrial and one aerial, each consisting of five robots, were deployed for the experiments. Each swarm performed three runs of the three swarm behaviors, totaling 18 runs in the experiment.
| Method | Behavior | |||||
|---|---|---|---|---|---|---|
| Pursuit | Fireworks | Lennard-Jones | ||||
| Range | Bearing | Range | Bearing | Range | Bearing | |
| UWB Air | 0.071 | 0.27 | 0.163 | 0.15 | 0.100 | 0.25 |
| UWB Ground | 0.327 | 0.24 | 0.124 | 0.65 | 0.090 | 0.98 |
| Vision Ground | 0.161 | 2.23 | 0.071 | 0.16 | 0.068 | 0.87 |
Aerial Robots: Lennard-Jones
Aerial Robots: Pursuit
Ground Robots: Fireworks
Ground Robots: Lennard-Jones
Ground Robots: Pursuit